



I et pågående EU-prosjekt har TØI forsøkt å predikere så mange tenkelige virkninger av selvkjørende biler som dagens kunnskap gir grunnlag for.
EUs forskningsprogram Horizon 2020 har flere prosjekter om selvkjørende biler (connected and automated vehicles). TØI deltar i prosjektet LEVITATE (Societal level impacts of connected and automated vehicles), som handler om samfunnsmessige virkninger av selvkjørende biler.
Dette er den første i en serie av artikler der de viktigste resultatene fra dette prosjektet vil bli presentert.
Det første spørsmålet var: Hvilke virkninger kan selvkjørende biler tenkes å ha? For å svare på dette spørsmålet ble tidligere studier gjennomgått. På grunnlag av dem ble det laget en liste over mulige virkninger. Virkningene ble klassifisert etter to kriterier:
- Virkningenes utstrekning i tid og rom.
- Om virkningene er tilsiktede eller utilsiktede.
Virkninger på tre nivåer
De mulige virkningene ble delt i tre grupper etter sin utstrekning i tid og rom. Det ble skilt mellom virkninger på individnivå, virkninger på systemnivå og virkninger på samfunnsnivå.
Virkninger på individnivå gjelder den enkelte trafikant på den enkelte tur, men omfatter også endringer i tilgang til transportressurser.
Virkninger på systemnivå gjelder transportsystemet og omfatter blant annet køer, reisetider, kapasitetsutnyttelse og en mulig overgang til delemobilitet.
Virkninger på samfunnsnivå forekommer både i og utenfor transportsystemet og omfatter eksempelvis ulykker, forurensning, sosial ulikhet i transport og arealbruk.
I alt ble 33 mulige virkninger definert. Tallet er selvsagt vilkårlig, men viser at selvkjørende biler kan tenkes å ha mange virkninger.
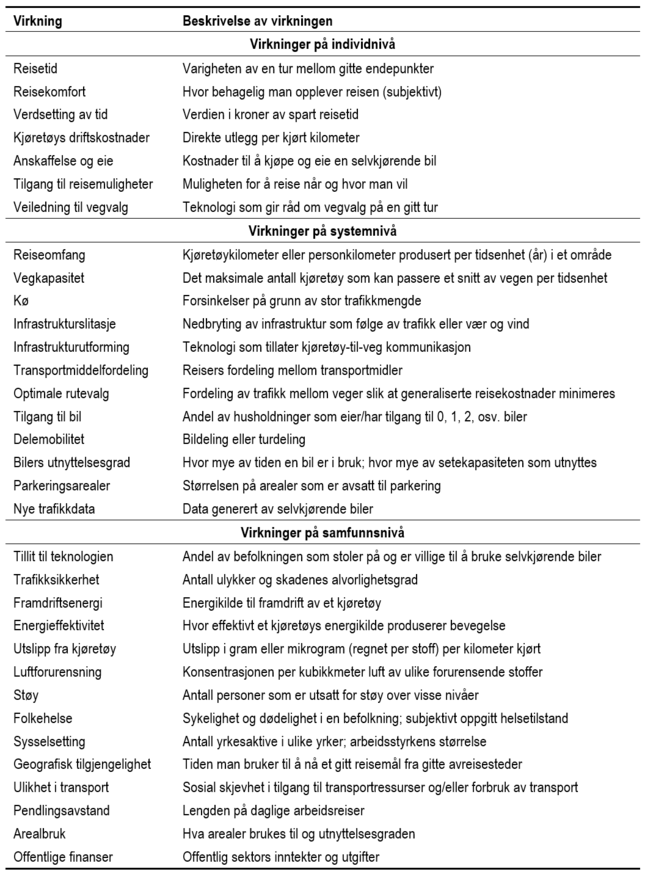
Tabell 1 lister opp virkningene. Det er 7 virkninger på individnivå, 12 på systemnivå og 14 på samfunnsnivå.
Noen virkninger kan plasseres i alle grupper. Eksempelvis rammer en trafikkulykke en eller flere trafikanter på en gitt tur (individnivå), men skaper gjerne forsinkelser for andre trafikanter (systemnivå) og har konsekvenser utenfor transportsystemet (helsevesenet; samfunnsnivå). I slike tilfeller er virkningen plassert på det høyeste nivået, samfunnsnivået.
Alle virkninger i tabell 1 kan regnes både som ønskede (tilsiktede) og uønskede (utilsiktede). Det kommer an på hvilket fortegn de har: mindre kø er bra, mer kø er ikke bra.
Tabell 1. Mulige virkninger av selvkjørende biler. Kilde: Elvik mfl. 2019
Dette må da bli bra – eller?
Det er, som nevnt, mange som håper på at selvkjørende biler kan løse eller sterkt redusere de skadevirkninger reiser og transport har i dag i form av køer, forurensning, støy, ulykker og bruk av uønsket store arealer til transportformål, særlig parkering.
Det er ingen tvil om at selvkjørende biler kan bidra til å redusere disse problemene, men det er ikke sikkert at virkningene vil bli så store som enkelte optimister tror.
Noen hevder at ulykkene kan bli redusert med 95 %, fordi 95 % av ulykkene skyldes feil føreren har begått og når føreren forsvinner, forsvinner også alle disse feilene. Det er en besnærende enkel logikk, men den overser en rekke faktorer som betyr at vi nok må regne med at det vil bli en del ulykker også i et system der alle biler er selvkjørende. Tenk over følgende:
- Ikke alle trafikanter blir automatiserte. Fotgjengere, syklister, mopeder og motorsykler vil ventelig fortsatt finnes. Det vil forekomme ulykker der disse trafikantgruppene er innblandet (eksempelvis fotgjenger påkjørt av motorsykkel).
- Teknologien må være mer feilfri enn mennesket for å bedre sikkerheten. Mennesket er en svært pålitelig operatør av motorkjøretøy. Det kjøres, statistisk sett, hundretusenvis av kilometer mellom hver ulykke. Og når den skjer, er den i de aller fleste tilfeller en ulykke med kun materielle skader.
- Det vil forekomme plutselige og uforutsette hendelser som skjer så fort at teknologien ikke rekker å reagere i tide. En elg hopper ut rett foran bilen, som ikke rekker å stoppe.
- Det er mange uløste – muligens uløselige – problemer knyttet til samhandling mellom selvkjørende biler og ikke-automatiserte trafikanter. Misforståelser i slike samhandlinger må påregnes å føre til ulykker.
- Skal vi tvinge alle til å gå over til selvkjørende biler, eller skal det fortsatt være lov å kjøre gammeldagse førerstyrte biler? Det er mange som liker å kjøre bil og nødig vil overlate det til en datamaskin. Hvis vi forbyr bilkjøring, skal vi da også forby motorsykler? Eller skal vi la bilister som vil kjøre for moro skyld få lov til å kjøre motorsykkel i stedet for bil?
- Hvis det blir billigere å bruke selvkjørende biler enn dagens biler, kan trafikken ventes å øke. Selv med en mye lavere ulykkesrisiko enn i dag, vil økt trafikk føre til flere ulykker enn om trafikken ikke øker.
- Selvkjørende biler vil være koblet til datasentraler som kan hackes. Hackere kan legge inn feil i programmene som styrer bilene og dermed skape ulykker.
Færre ulykker enn i dag? Ja, det er trolig. 95 % færre? Neppe. Det som er gjennomgått av forskning i LEVITATE tyder jevnt over på færre ulykker, men ikke 95 % færre.
I senere artikler kommer jeg tilbake til hvor langt det i dag er mulig å tallfeste de tenkelige virkningene av selvkjørende biler og hvor usikre slike beregninger er.
Utviklingen må styres
Den viktigste lærdommen jeg som statsviter trekker av de studier jeg har lest om mulige virkninger av selvkjørende biler, er at innføringen av dem i transportsystemet må styres.
I våre dager snakkes det ofte om dystopier og utopier. En dystopi er et skremmebilde; en skildring av en fremtid vi ikke ønsker. En utopi er det motsatte: et bilde av en ønskelig fremtid.
Du finner begge deler i litteraturen om selvkjørende biler. I mange byer tror man mest på utopiene. Ifølge dem vil selvkjørende biler føre til at individuell eie og bruk av bil går sterkt tilbake og erstattes av delemobilitet, enten i form av bildelingsordninger eller ved at man deler en tur med andre i samme bil. Dermed kan antall biler sterkt reduseres og parkeringsarealer frigjøres til annen bruk, eksempelvis bruk som oppmuntrer til å gå eller sykle. Aller best blir det hvis de selvkjørende bilene er elektriske. Da blir også støy og forurensning kraftig redusert.
Min kommentar til dette, er at en slik utvikling ikke kommer av seg selv. Tvert om tror jeg at kraftige virkemidler må tas i bruk dersom byenes utopi skal bli virkelighet.
Man må rett og slett hindre den viktigste mulige fordelen ved selvkjørende biler fra å bli oppnådd, nemlig at de generaliserte reisekostnadene reduseres.
All teknologisk utvikling i transport fram til nå har, i vid forstand, gått ut på å gjøre reiser og transport billigere. Det fremmer stordriftsfordeler og økonomisk utvikling. Men det skaper også mer transport.
Den kjente amerikanske økonomen Mancur Olson skal i sin tid ha sagt i en diskusjon: «Jeg skal fortelle deg en ting. Vann renner nedover uansett hvor du er i verden, og etterspørselskurver peker nedover uansett hvor du er i verden.» Med andre ord: Jo billigere noe blir, desto mer forbruker vi av det.
Det vi vet i dag tyder på at selvkjørende biler til å begynne med kan bli dyrere i anskaffelse enn dagens biler. Mange venter at det er forbigående; prisen på ny teknologi har en tendens til å falle etter hvert som den perfeksjoneres og masseproduseres.
Bruk av en selvkjørende bil kommer derimot etter all sannsynlighet til å bli billigere enn bruk av en førerstyrt bil, selv for en vanlig privatbilist. Det er åpenbart at de som driver busselskap eller lastebiltransport kan spare store summer på ikke å ha en fører, men også for en privatbilist vil bilbruken bli billigere. En selvkjørende bil vil kjøre mer drivstofføkonomisk og bli innblandet i færre ulykker. Det betyr penger spart.
Så hvis ingen griper inn i utviklingen, er det mer sannsynlig at selvkjørende biler betyr mer bilbruk enn at det betyr mindre bilbruk.
Fordelene ved individuell bilbruk som mange verdsetter i dag, vil trolig fortsatt bli verdsatt. Aktiv styring må høyst sannsynlig også til for å sikre full overgang til selvkjørende biler, det vil si unngå at det blir igjen en stor gruppe av førerstyrte biler som folk beholder fordi de synes det er moro å kjøre bil.
Referanse
Elvik, R., Quddus, M., Papadoulis, A., Cleij, D., Weijermars, W., Millonig, A., Vorwagner, A., Hu, B., Nitsche, P. 2019. A taxonomy of potential impacts of connected and automated vehicles at different levels of implementation. Deliverable D3.1 of the Horizon 2020 project LEVITATE.
DEBATTREGLER I SAMFERDSEL
Har du synspunkter på denne saken, så kom gjerne med dem her i kommentarfeltet! Det du skriver vil i de fleste sammenhenger fremstå som mer interessant og troverdig dersom du skriver under fullt navn. Hold deg til saken, vis respekt og raushet overfor andre og deres meninger. Husk at det du skriver kan bli lest av mange!
Ytringer som inneholder trusler eller annen form for sjikane, vil bli fjernet.
Vennlig hilsen
Samferdsel-redaksjonen