



Hvordan kan selvkjørende biler samhandle med fotgjengere og syklister uten at trafikken går i stå og helst slik at det blir færre ulykker enn i dag?
Dette er fortsatt et uløst problem og det kan tenkes at det er uløselig.
Forskningen om selvkjørende biler dreier seg nesten bare om biler. Liten oppmerksomhet har vært viet det faktum at ikke alle trafikanter blir automatiserte eller selvkjørende.
Et trafikksystem som består helt og holdent av selvkjørende biler vil fremdeles ha fotgjengere, syklister og personer som bruker moped eller motorsykkel.
Mopeder og motorsykler kan man selvsagt tenkes å forby. Men å forby folk å gå eller sykle er neppe tenkelig. Selvkjørende mopeder og motorsykler er også knapt tenkelig. Mange kjører moped eller motorsykkel for moro skyld.
Så, den mest sannsynlige utviklingen er at fotgjengere, syklister, mopeder og motorsykler vil finnes i et fremtidig trafikksystem der bilene er selvkjørende. Da blir spørsmålet:
Hvordan kan de selvkjørende bilene kommunisere og samhandle med disse trafikantene, særlig fotgjengere og syklister, uten at trafikken stopper opp og uten at det flere ulykker enn i dag, helst færre?
Dette spørsmålet har vært altfor lite studert i forskningen om selvkjørende biler, og et betydelig forsknings- og utviklingsarbeid gjenstår.
Det innser vi ved å se på et forslag til hvordan man kan skape sikre gangfelt i et system med selvkjørende biler.
Et sikkert gangfelt?
De israelske forskerne Heymann og Degani (2019) har foreslått det de kaller en «protokoll for sikker kryssing i et gangfelt når bilene er automatiserte». Ordet protokoll må her forstås som et sett av regler for hvordan en teknologi skal brukes slik at den skaper høyest mulig sikkerhet.
De drøfter protokollen med utgangspunkt i et gangfelt som vist i figur 1.
De tenker seg at kjørebanen utstyres med et innkoblingsfelt. Når en selvkjørende bil kjører inn i dette feltet, aktiviseres fotgjengerdetektering. Bilens detektor vil da undersøke om det er fotgjengere i ventesonen. Enhver fotgjenger som ønsker å krysse vegen pålegges å oppholde seg i ventesonen.
Dersom bilen oppdager en fotgjenger i ventesonen, vil den signalisere til fotgjengeren og til andre biler at fotgjengeren er oppdaget. Videre vil bilen signalisere at den vil stoppe ved stopplinjen. Når bilen har stoppet der, må fotgjengeren krysse vegen i gangfeltet. Når bilen detekterer at fotgjengeren har krysset, kjører den videre.
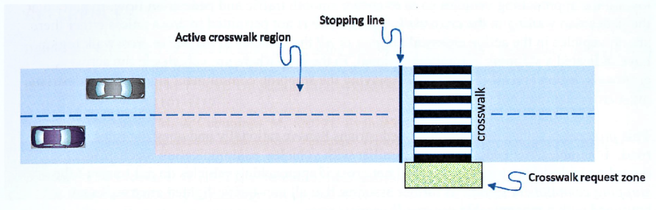
Figur 1: Skisse av et gangfelt med sikkerhetsteknologi for selvkjørende biler. Kilde: Heymann og Degani 2019.
Hvis alt fungerer slik, vil kryssingen bli sikker.
Dessverre er det en rekke åpenbare problemer med dette systemet som gjør det tvilsomt om det vil fungere som beskrevet over.
For det første: Hvor stor blir ventesonen? Hvis den dekker hele fortauet, vil en fotgjenger som ikke har til hensikt å krysse vegen, men fortsette rett fram, gå gjennom ventesonen og dermed kunne utløse en falsk alarm. I så fall må bilene ha et system for å kunne skille mellom ekte og falske signaler om å krysse vegen, muligens basert på oppholdstid i ventesonen (kort oppholdstid = en som bare går gjennom og ikke vil krysse).
Det sier seg selv at et slikt system umulig kan bli hundre prosent pålitelig. Bilen kan feilaktig tro at en fotgjenger som brått ombestemmer seg ikke hadde tenkt å krysse.
For det andre: Hva gjør en bil som er halvveis inne i innkoblingsfeltet når det kommer en fotgjenger i ventesonen? Gir på for å komme over gangfeltet før fotgjengeren rekker det? Bråbremser for å slippe fotgjengeren over?
Her er mulighetene for misforståelser åpenbare. Problemet er velkjent i dagens trafikk og kalles dilemmasone. Enhver bilfører kjenner til det. Hva gjør du når lyset skifter til gult? Ja, er det like før du kommer til krysset, vil de fleste kjøre over på gult, selv om det kanskje har blitt rødt før de har kommet helt over. I et signalregulert kryss vil dette som regel gå bra. Alle slike kryss har en såkalt «tømmingstid», der det er rødt i alle retninger.
Innkoblingsfeltet vil uunngåelig bli en dilemmasone. Man kunne tenke seg at dilemmaet ble enklere å løse ved å forlenge innkoblingsfeltet. Det er naturligvis en illusjon. Det vil fortsatt oppstå situasjoner der det ankommer en bil og fotgjenger samtidig når bilen er nær ved gangfeltet.
For det tredje: Vil alle fotgjengere forstå og rette seg etter bilens signaler? Må ikke bilen også ha et signal som forteller at «Jeg stopper ikke», ikke bare et signal som forteller at jeg stopper.
Fotgjengere består av barn, fulle folk, psykisk utviklingshemmede, svaksynte og andre som ikke uten videre kan antas alltid å oppfatte bilens signaler riktig.
For det fjerde: Hva med syklister? I Norge har vi etablert en uformell og regelstridig praksis som fungerer utmerket og er til alles beste: Syklisten sykler over gangfeltet og bilen viker for syklisten. Trafikkreglenes løsning – at syklisten går av sykkelen og triller den over gangfeltet er mer tungvint og tidkrevende både for syklist og bilist.
Vil en selvkjørende bil forstå, eller kunne lære seg, slike uformelle normer? Eller skal vi rett og slett endre reglene og gjøre vanlig praksis til lovens regel?
Listen over problemer ender ikke her. Man kan tenke seg at barn og ungdom vil leke med de selvkjørende bilene ved å løpe fram og tilbake i et gangfelt i lang tid. En bilfører vil ikke finne seg i det så lenge, men tute på ungene, kjefte på dem eller kjøre veldig sakte over gangfeltet. Klarer en selvkjørende bil å løse problemet på samme måte?
Hva kan fungere?
Det finnes allerede i dag systemer for fotgjengerdetektering og automatisk nødbrems. Forsøk viser at slike systemer fungerer ganske bra når farten er 30 km/t eller lavere. Da klarer systemet i de fleste tilfeller enten å stoppe i tide eller bremse såpass at fotgjengeren blir mindre alvorlig skadet ved påkjørselen.
Hvis farten derimot er 50 km/t fungerer dagens systemer for detektering og nødbrems dårlig og klarer ikke å forhindre påkjørsel.
Den første konklusjonen jeg trekker, er derfor at selvkjørende biler ikke kan holde en høyere fart i nærheten av gangfelt enn 30 km/t.
En høyere fart gjør det vanskeligere å stoppe og kan føre til så kraftig bremsing at det i beste fall er ubehagelig, i verste fall fører til skader, for dem som er i den selvkjørende bilen.
Den andre konklusjonen jeg vil trekke er at et gangfelt av den typen som ble drøftet over ikke vil fungere.
De eneste typene kryssingssteder som kan tenkes å fungere er signalregulerte gangfelt og planskilte kryssinger, altså bruer eller tunneler.
Et signalregulert gangfelt minner på mange måter om gangfeltet som er beskrevet over. Men det er lettere å håndtere. Man kan, som i dag, utstyre det med anropsknapper. En selvkjørende bil behøver bare å programmeres til å stoppe for rødt lys, ikke til å tolke tvetydige signaler fra en ventesone.
Jeg tror ikke at selvkjørende biler vil gjøre signalregulerte gangfelt sikrere enn de er i dag, men jeg tror heller ikke at de vil gjøre dem farligere.
Bortsett fra disse løsningene, kan jeg ikke skjønne annet enn at enhver samhandling mellom selvkjørende biler og fotgjengere, syklister, mopeder og motorsykler rett og slett må unngås helt, siden slik samhandling i stor grad bygger på uformelle normer og subtile signaler (blikkontakt, kroppsspråk) en selvkjørende bil aldri vil oppfatte eller lære seg å tolke riktig.
Referanse
Heymann, M., Degani, A. 2019. Autonomous vehicle interactions with other road users: conflicts and resolutions. Proceedings of the tenth international symposium on human factors in driver assessment, training and vehicle design.
DEBATTREGLER I SAMFERDSEL
Har du synspunkter på denne saken, så kom gjerne med dem her i kommentarfeltet! Det du skriver vil i de fleste sammenhenger fremstå som mer interessant og troverdig dersom du skriver under fullt navn. Hold deg til saken, vis respekt og raushet overfor andre og deres meninger. Husk at det du skriver kan bli lest av mange!
Ytringer som inneholder trusler eller annen form for sjikane, vil bli fjernet.
Vennlig hilsen
Samferdsel-redaksjonen