



Hvis vi ikke forstår hvordan selvkjørende kjøretøyer vil påvirke eksisterende trafikksystemer, kan vi ikke ta for gitt at innføring av selvkjørende kjøretøyer vil forbedre sikkerheten og effektiviteten.
Heldigvis finnes det metoder som kan kaste lys over samspillet mellom selvkjørende kjøretøyer og andre komponenter i trafikksystemer. Bruk av slike metoder vil øke sannsynligheten for systemendringer som er til fordel for samfunnet, og som fortsatt har mennesker og ikke teknologi i sentrum.
Digitalisering, automatisering, oljenedtur, koronakrise …
De siste årene har politikere i Norge gitt sterk støtte til innovasjon innenfor digitalisering og automatisering. Samtidig har FoU-strategier oppmuntret til raske endringer innen samferdselen, drevet av entreprenørskap og næringsliv.
Oljenedturen, og nå koronakrisen, vil trolig framskynde moderniseringen av trafikksystemer (DN, 27.04.20 s. 4). Det er da naturlig å tenke at også innføring av selvkjørende biler vil framskyndes, spesielt med tanke på potensialet de har for å øke sikkerheten, framkommeligheten og kapasiteten på norske veier.
Da blir spørsmålet: Hvordan kan vi sørge for at selvkjørende biler er med på å skape trafikksystemer som er effektive, sikre og ønskelige?
Det er mange dokumenterte tilfeller hvor teknologi ikke har utfylt sitt potensial, etter implementering i komplekse systemer. Vi ser allerede at ulykker med selvkjørende biler inntreffer i trafikken (Elvik Samferdsel 08.05.20) og mange, hvis ikke alle, kan forklares av uforutsette samspill mellom teknologien og andre komponenter i trafikksystemet (Thomas, 2019).
Hele trafikksystemer, ikke bare komponenter
For å oppnå visjonen om null drepte og hardt skadde, er det viktig at vi unngår slike ulykker i framtiden. Da blir det viktig at vi tar inn over oss at:
- entreprenører og næringsliv utvikler, fremmer og leverer kjøretøyer som er komponenter av trafikksystemer; og
- trafikksikkerhet, mobilitet og andre viktige samfunnsmål er egenskaper av trafikksystemer, ikke av komponenter.
Trafikksikkerhet og mobilitet kommer fram fra et komplekst samspill blant systemets sosiale og strukturelle komponenter. De er et resultat av hvordan teknologi, kjøretøyer, trafikanter og infrastruktur interagerer i trafikksystemer.
Dette betyr at alle som er ansvarlig for utvikling av veitrafikksystemer – og ikke bare bilfabrikantene – forstår og tar hensyn til samspillet mellom selvkjørende biler og andre komponenter i systemet.
Da spørs det hvordan de kan gjøre det?
Metoder som gir innsikt
Det finnes flere metoder som kan gi innsikt i samspill mellom sosiale og strukturelle komponenter i komplekse systemer. To eksempler er nettverksanalyse og kontrollanalyse.
1. Nettverksanalyse
Analytikeren konstruerer ulike typer av nettverk som sammen representerer det sosiotekniske systemet. Nettverkene baseres på data samlet inn fra reelle trafikksituasjoner, for eksempel fra ulike typer av trafikantgrupper mens de bruker samme veikryss (Lenné og Fitness, 2015).
Følgende typer av nettverk bygges:
- Oppgavenettverk som beskriver hva trafikantgrupper eller selvkjørende kjøretøyer gjør mens de bruker krysset.
- Sosialt nettverk som beskriver hvordan trafikantgrupper eller andre teknologiske komponenter kommuniserer med hverandre og hvor ofte de kommuniserer med hverandre, mens de bruker krysset.
- Nettverk om situasjonsbevissthet som beskriver hvilke objekter som ulike trafikantgrupper er oppmerksomme på mens de bruker krysset.
En sammenligning av nettverkene for ulike trafikantgrupper (eller selvkjørende kjøretøyer) kan kaste lys over utfordringer som kommer fra samspill i trafikken i reelle trafikksituasjoner.
2. Kontrollanalyse
Man analyserer hvordan kontroll utføres blant sosiale og strukturelle komponenter i systemet (Leveson, 2012). Følgende trinn brukes:
- Definere og avgrense systemet.
- Definere «tap», systemutfall man vil unngå for å oppnå viktige mål relatert til effektivitet, miljø eller sikkerhet (f. eks., at fotgjengere blir skadet eller drept).
- Se på systemet og identifisere ulike situasjoner som kan føre til «tap» (f. eks. bil kjører på fotgjengere som venter på et kryss).
- Identifisere systembegrensninger, «constraints», som komponentene sammen må imøtekomme for å unngå «tap» (f. eks. biler må aldri kjøre på fortauet).
- Modellere systemets kontrollstruktur (jf. figur 1, nedenfor).
- For hver «control loop» i systemet, identifisere mulige feilhandlinger som kan føre til tap, og for hver feilhandling identifisere mulige årsaker.
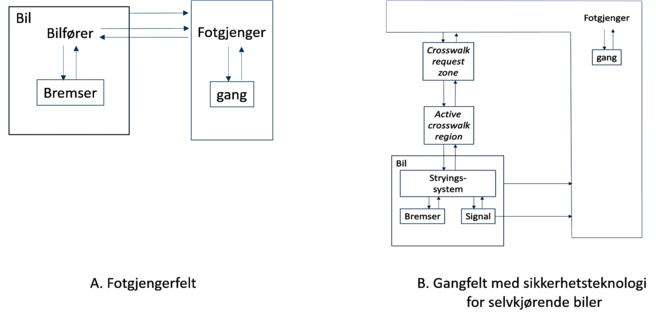
Figur 1: Analyse av kontrollstrukur for A. Fotgjengerfelt for bil med menneskelig fører, og B. Gangfelt med sikkerhetsteknologi for selvkjørende biler (Heymann og Deganis, 2019).
Systemet påvirker og blir påvirket av ny teknologi
Nettverksanalyse, kontrollanalyse og andre systemanalyser gir systematisk, eksplisitt og ofte overraskende informasjon om hvordan systemet vil påvirke og bli påvirket av ny teknologi.
Nettverksanalyse har vist, for eksempel, at mange veikryss er dårlig egnet til samtidig bruk av syklister og menneskelige bilførere (Lenné og Fitness, 2015). Også selvkjørende kjøretøyer vil møte utfordringer fra dårlig utformede kryss, og som én av flere komponenter i trafikkbildet, bør selvkjørende biler også «nettverksanalyseres» for å lære om hvordan trafikksystemer blir når de er til stede.
Kontrollanalyse kan supplere med nyttig innsikt i hvordan mennesker kontrollerer utilsiktede hendelser i trafikken i samspill med teknologiske komponenter (programvare, styringssystem, kjøretøy, trafikklys osv.).
Figur 1 illustrerer at en teknologisk kryssløsning for selvkjørende biler har en mer kompleks kontrollstruktur enn et vanlig fotgjengerfelt, og at vi derfor må regne med et mer komplekst samspill mellom et større mangfold av komponenter for å identifisere utfordringer i systemet.
En kontrollanalyse gir en grundig og systematisk måte å gjøre dette på, og kan vise hvordan en fotgjengers tankegang sammen med algoritmer i en selvkjørende bil, for eksempel, kan føre til at «systemet» mister kontroll, og true oppnåelse av viktig samfunnsmål.
Et felles ansvar for ulykker
I en nylig Samferdsel-artikkel, stilte Elvik (31.03.20) et viktig spørsmål:
Hvordan kan selvkjørende biler kommunisere og samhandle med fotgjengere og syklister uten at trafikken går i stå og helst slik at det blir færre ulykker enn i dag?
Så lenge ulike typer av trafikanter må dele veien, kan ikke løsningen finnes ved utelukkende optimalisering av teknologi. Det trengs heller en felles optimalisering av trafikksystemets sosiale, teknologiske og strukturelle komponenter.
Ansvar for ulykker og andre systemutfall, er i ferd med å bevege seg fra trafikanten til myndigheter, bilfabrikanter og andre som sammen påvirker trafikksystemer (Pöllänen et al., 2020). Det er derfor viktig at disse aktørene forstår hvordan ny teknologi vil påvirke systemer når den implementeres.
For å gjøre dette, må de ta i bruk metoder som er egnet for analyser på systemnivå, for vi kan ikke tro at endringer på komponentnivå vil føre til sikre trafikksystemer.
Referanser:
Heymann, M., Degani, A. 2019. Autonomous vehicle interactions with other road users: conflicts and resolutions. Proceedings of the tenth international symposium on human factors in driver assessment, training and vehicle design.
Leveson, N. (2012). Engineering a safer world: Systems engineering applied to safety. MIT Press, Cambridge; MA.
Lenné, (M.G.), Fitness, J.A. (2015). EAST at road intersections. I: Systems thinking in practice: Application of the Event Analysis of Systematic Teamwork Method. CRC Press, Boca Raton, FL.
Pöllänen, E., Read, G.J.M., Lane, B.R., Thompson, J., Salmon, P.A. (2020). Who is to blame for crashes involving autonomous vehicles? Exploring blame attribution across the road transport system. Ergonomics, 63, 525-537.
Thomas, J. (2019). STAMP/STPA developments and new applications to autonomy. Presentation at European STAMP Workshop and Conference (ESWC) 2019, Espoo, Finland, 19. september 2019.
DEBATTREGLER I SAMFERDSEL
Har du synspunkter på denne saken, så kom gjerne med dem her i kommentarfeltet! Det du skriver vil i de fleste sammenhenger fremstå som mer interessant og troverdig dersom du skriver under fullt navn. Hold deg til saken, vis respekt og raushet overfor andre og deres meninger. Husk at det du skriver kan bli lest av mange!
Ytringer som inneholder trusler eller annen form for sjikane, vil bli fjernet.
Vennlig hilsen
Samferdsel-redaksjonen