



I flere land pågår det nå testing av selvkjørende kjøretøy. Felles for testene er at de hovedsakelig er utført på til dels avlukkede områder (med unntak av forsøk utført av f. eks. Waymo/Google, Uber og Tesla) og ved lave hastigheter.
Av juridiske årsaker har det i de fleste land vært påkrevd at det er en person i bilen som kan ta over om systemet skulle svikte.
Kjøretøyene må per i dag holde lave hastigheter, for å sikre at bilen kan stoppe tidsnok til å unngå en kollisjon. Bilens sensorer skal kunne oppdage hindringer i tide, tolke informasjonen og foreta nødvendige handlinger.
De fleste systemene har fortsatt problemer med å tolke enkelte trafikksituasjoner, og mørke/snø/regn/støv/skarpt lys kan gjøre bildene fra sensorene uskarpe og dermed vanskelig å tolke.
Bidrar de til mer eller mindre kjøring?
Innføring av selvkjørende kjøretøy betyr at flere grupper av befolkningen kan bli mer mobile. En beregning fra USA (Harper m.fl. 2016) anslår en øking på 14 % i årlige kjøretøykilometer med personbil om eldre og personer med funksjonsnedsettelser begynner å benytte selvkjørende biler. Om en inkluderer barn og ungdom, vil denne andelen kunne øke ytterligere.
Når en viss andel av kjøretøyene er selvkjørende, vil V2V (vehicle-to-vehicle)- kommunikasjon kunne gi bedre kapasitetsutnyttelse av vegen, og bedre flyt. En studie utført i USA (Fagnant og Kockelman 2013) indikerte at opp mot 10 personbiler kan erstattes av én selvkjørende bil ved optimalisert samkjøring, men det betyr ikke nødvendigvis at det blir 90 % færre biler på vegen.
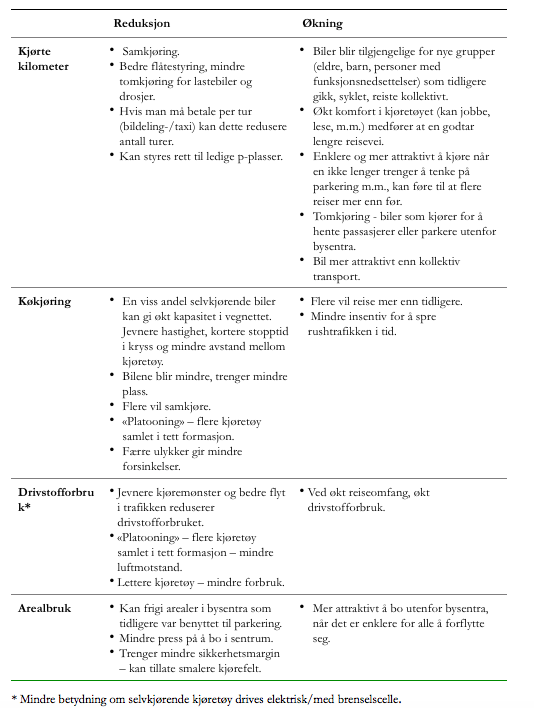
Tabell 1: Argumenter som kan tale for og imot positive miljøvirkninger av selvkjørende kjøretøy. Kilder: EC 2017, Wadud m.fl. 2016, PSC m.fl. 2017, Litman 2017.
Wadud m.fl. (2016) har forsøkt å estimere de totale virkninger av selvkjørende kjøretøy på energiforbruket, se figur 1. Økt reiseomfang som følge av at kjøring vil oppfattes som mindre belastende (tidskostnadene blir lavere) kan gi et stort bidrag i negativ retning.
Andre faktorer som kan virke negativt er:
- økt fart (når sikkerheten bedres – kan sikkerhetsmarginen tas ut i økt fart)
- nye brukergrupper
- økt etterspørsel etter nye elementer i kjøretøyet (romsligere, større og bedre seter, tv-skjermer m.m.).
I positiv retning:
- mindre behov for store biler med kraftig motorstyrke
- økokjøring, «platooning», samkjøring, bildeleordninger
- smalere kjørefelt (kan tillate mindre sikkerhetsmarginer gitt at en høy andel av kjøretøyene er selvkjørende)
- redusert risiko for ulykker (og dermed mindre behov for ekstrautstyr i kjøretøyet)
Mekanismen «vehicle right-sizing» (tilpasse bilens størrelse etter antall passasjerer) kan til dels motvirkes av et ønske om større biler som kan virke som «bevegelige kontorer».
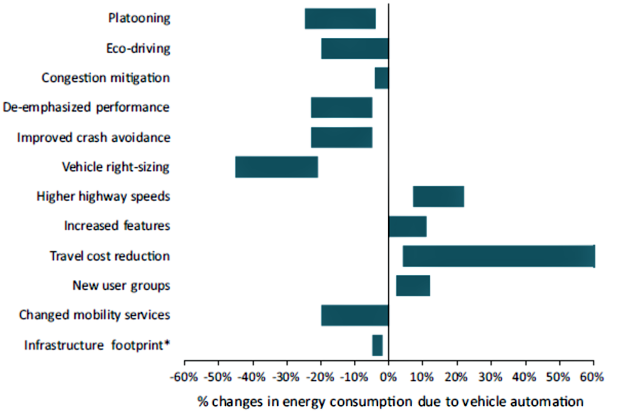
Figur 1: Estimerte endringer i energibruk ved ulike mekanismer som kan oppstå ved overgang til selvkjørende kjøretøy. Kilde: Wadud m.fl. 2016. (Søylene angir anslått usikkerhet).
Det er stor usikkerhet knyttet til om selvkjørende kjøretøy vil ha en positiv virkning på miljøet eller ikke. De fleste forskere tror at antallet kjørte kilometer vil øke gitt at en ikke innfører restriksjoner, mens det er mer delte meninger om hvordan selvkjørende kjøretøy vil påvirke køkjøring og energiforbruket totalt.
Virkningene vil i stor grad påvirkes av andelen selvkjørende kjøretøy på vegene, og også av i hvilken grad befolkningen omfavner delemobilitet.
Ifølge en britisk studie (Atkins 2016) må en opp i en andel på minst 50–75 % selvkjørende kjøretøy før bedringer i trafikkflyten kan forventes. Om alle selvkjørende kjøretøy blir elektriske eller nullutslippskjøretøy, vil dette virke i positiv retning.
Utfordringer
Før selvkjørende kjøretøy blir fritt tilgjengelige, må flere utfordringer håndteres, blant annet (EC 2017, ERTRAC 2017):
- Billigere og bedre sensorer.
- Bedre håndtering av situasjoner med blandet trafikk. Teknologi som fungerer ved alle hastigheter, og som også fungerer på snødekte veger og veger uten oppmerking.
- Utvikle et felles europeisk rammeverk og lovverk, og nasjonale lovverk.
- Definere minstekrav som selvkjørende kjøretøy (og systemer) må tilfredsstille.
- Harmonisering og standardisering. For å muliggjøre V2V- og V2I-kommunikasjon mellom kjøretøy fra ulike bilprodusenter og problemfri kjøring over landegrenser.
- Innføre nødvendige endringer av infrastruktur/trafikkregler/trafikkstyring.
- AI-teknologi som takler de moralske dilemmaene som kan oppstå i blandet trafikk (f. eks. hva skal gjøres i situasjoner der en må velge mellom to onder).
- Håndtering av store datamengder/datasikkerhet/personvern.
- Hvem er juridisk ansvarlig ved en ulykke.
Mye tyder på at innføring av selvkjørende biler kan medføre mer kjøring om en ikke innfører tiltak for å begrense dette. Fokus på ulike former for delemobilitet og et vegprisingssystem som er kilometerbasert er tiltak som kan være med på å begrense/forhindre en slik utvikling. Nullutslippsteknologi vil også kunne redusere mulige negative virkninger på transportomfanget.
Referanser
Atkins Ltd. (2016). Research on the impacts of connected and autonomous vehicles (CAVs) on traffic flow. Summary report. For UK Department for Transport. May 2016.
European Commission (EC) (2017). Connected and automated transport. Studies and reports. Brussels, Directorate-General for Research and Innovation. Unit H.2 Surface transport.
ERTRAC (2017). Automated driving roadmap. ERTRAC working group “Connectivity and automated driving”. May 2017.
Fagnant, D. J. and Kockelman, K. M. (2013). The travel and environmental impact of shares autonomous vehicle, using agent-based model scenarios. Transportation Research Part C, vol. 40, pp. 1-13.
Harper, C. D., Hendrickson, C. T., Mangones, S. and Samaras, C. (2016). Estimating potential increase in travel with autonomous vehicle for the non-driving, elderly, and people with travel-restrictive medical conditions. Transportation Research Part C, vol. 72, pp. 1-9.
Litman, T. (2017). Autonomous vehicle implementation predictions. Implication for transport planning. Victoria Transport Policy Institute.
Public sector consultants (PSC) and Center for automotive research (CAR) (2017). Planning for connected and automated vehicles. Ann Arbor, Michigan. March 2017.
Wadud, Z., MacKenzie, D. and Leiby, P. (2016). Help or hindrance? The travel, energy and carbon impact of highly automated vehicles. Transportation Research Part A, vol. 86, pp. 1-18.
For mer informasjon; se også nettstedet Tiltak.no og bidraget om selvkjørende kjøretøy.
DEBATTREGLER I SAMFERDSEL
Har du synspunkter på denne saken, så kom gjerne med dem her i kommentarfeltet! Det du skriver vil i de fleste sammenhenger fremstå som mer interessant og troverdig dersom du skriver under fullt navn. Hold deg til saken, vis respekt og raushet overfor andre og deres meninger. Husk at det du skriver kan bli lest av mange!
Ytringer som inneholder trusler eller annen form for sjikane, vil bli fjernet.
Vennlig hilsen
Samferdsel-redaksjonen