



Vogntoget som kommer imot deg mister veigrepet og skrenser over i ditt kjørefelt. Ett av de verste scenariene det går an å se for seg på veiene. Dessverre skjer det fra tid til annen. Dessverre inngår det også i et mønster som har gått igjen i årtier.
Ingen ble skadet i nestenulykken som ble filmet på E8 i Troms i slutten av oktober i år. Men hendelsen er en påminner om en lignende ulykke bare måneder tidligere. 7. januar 2019 fikk et vogntog skrens og kolliderte med en møtende personbil på den samme veien. En ung mann mistet livet. Ulykken skapte mange reaksjoner i ettertid.
Det har ikke vært mangel på årsaksforklaringer og krav om tiltak. Både politi, veimyndighetene, transportnæringen, transportkjøpere og samferdselsministeren var på banen etter ulykken.
Alle trekker fram faktorer de mener gjør trafikken sikrere. Mer kontroll og skjerping av forskriftskrav er gjennomgående. Denne måten å tenke årsaker og tiltak på er også dypt forankret i lovverket. Få stiller spørsmål ved dette synet.
Visst kan sikkerheten forbedres med flere kontroller, bedre dekk, og bedre rammebetingelser. Men bare til et visst punkt. Selv om alt er på stell kan det likevel gå galt.
Vi mangler rett og slett forklaringsmodeller som gjør oss i stand til å beskrive hva som skal til for at det skal gå bra. En slags omvendt ulykkesmodell.
Gjennom mine mer enn 20 år i arbeid for bedre trafikksikkerhet har jeg gjort meg noen tanker om hva en slik modell bør inneholde.
Modellen jeg ser for meg kan presenteres som to bud med hver sine tre forklaringsvariabler.
Første bud: Sikker transport må være mulig
Et fungerende veitrafikksystem bygger på noen forutsetninger. Vei, kjøretøy (med og uten last) og fører må ha egenskaper til å produsere ytelser som gjør en sikker transport mulig.
Dette kan reguleres i forskrift som i dag. Men skal det være funksjonelt, må de enkelte forskriftene stå i relasjon til hverandre. Alle tillatte kombinasjoner av vei, kjøretøy og fører må være i stand til å produsere et vellykket transportscenario etter reglene.
Forskriftene må også ta høyde for bruk av teknologi som kan støtte eller erstatte stadig flere føreroppgaver. Derfor brukes begrepet styringsenhet istedenfor fører.
Når et kjøretøy ikke er skodd for å komme opp en glatt og bratt bakke, eller når høyden på en overliggende bru er mindre enn kjøretøyets høyde, er ikke transporten på den aktuelle strekningen mulig. Med tilgang på rett informasjon kan dette avklares før transporten i det hele tatt starter.
En fordel med å se forskriftskravene i sammenheng, er at det går an å gjøre fravik på ett område så lenge det blir kompensert på et annet. Sentrisk kjøring i tunnel når møtende trafikk stanses, er ett eksempel.
Det viktige er at transporten lar seg gjennomføre, og at systemet er tilrettelagt for at det kan skje. Dagens regelverk er ikke basert på en slik gjennomføringsplan. Tillempningene som har blitt gjort ved militærøvelser er et konkret eksempel på dette.
I praksis er det trafikantene som må gjøre kompensasjonen, enten de er forberedt på det eller ikke. I en fremtidig situasjon med selvkjørende biler vil denne filosofien simpelthen ikke fungere. Autonome biler kan ikke utføre andre handlinger enn de er programmert for å gjøre.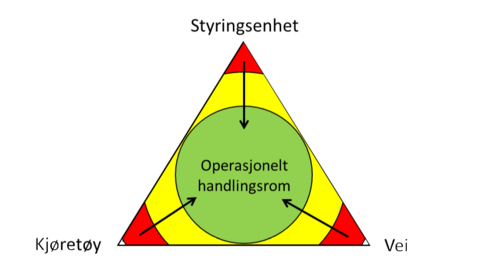
Figur 1: Samvirkende krav til systemkomponentene vei, kjøretøy og styringsenhet (fører/teknologi). Forutsetningen for sikre transporter oppnås først når de samlede ytelseskravene er innfridd.
Under en transport kan naturligvis én eller flere av forutsetningene svikte. En fører kan sovne og teknologien kan gå i lås. Dekket kan punktere og veien kan rase ut. Dette danner forklaringsvariabler til uønskede hendelser eller ulykker som beror på sammenbrudd i selve strukturen.
Andre bud: Sikker transport må styres
Med forutsetningene til vei, kjøretøy og styringsenheten på plass, vil en transport være tilbøyelig til å kunne gå bra. Det det står på nå, er om transporten blir styrt på en kontrollert måte, innenfor noen fysiske begrensninger.
Det er disse forutsetningene og begrensningene som til sammen danner det som kan defineres som et operasjonelt handlingsrom – mulighetsrommet for suksess.
Det er verdt å merke at ordet kontroll i denne sammenhengen betyr å styre transportprosessen på en sikker måte mot et definert mål. Grensekontroller og stikkprøver for å se til at ting er i orden – at de skrevne reglene er fulgt – er noe annet.
Mens forutsetningene utgjør de mer statiske premissene, vil selve transporten bære preg av dynamikk og kontinuerlige variasjoner. Kreftene som settes i sving når kjøretøy kommer i bevegelse, må være under kontroll.
De reglene som da må følges, kan ikke leses ut av en forskrift. Her er det naturlovene som gjelder, og de går det ikke an å snike seg unna. Samtidig må en dynamisk prosess alltid ha rom for å kunne variere.
Så langt jeg kan se, er det «bare» tre typer av variabler det er nødvendig å ha kontroll på under en transport for at den skal bli vellykket. Alle dreier seg om å holde vedlike en fysisk margin.
Den første typen er å kunne navigere kjøretøyet innenfor et definert og klarert veirom tilrettelagt for ferdselen fra A til Å. Vi må sørge for tilstrekkelig klaring sideveis og i høyden mot en ytre fysisk begrensning. Jeg har kalt denne størrelsen ΔC – marginen for klaring (clearance).
Den andre typen er å ha kontroll over stabiliteten til kjøretøyet, slik at det kan beholde grepet mellom dekk og veibane. Et kjøretøy i bevegelse utsettes for krefter, og blir disse kreftene for store vil kjøretøyet miste veigrepet ved å skrense eller velte. Jeg har kalt denne størrelsen ΔF – marginen for påvirkende krefter (forces).
Den tredje og siste typen er å håndtere trafikale situasjoner når de oppstår, slik at det opprettholdes en avstand til andre trafikkenheter eller objekter som kommer i konflikt innenfor det tilgjengelige veirommet (ref. type I). Jeg har kalt denne størrelsen ΔD – marginen for avstand til potensielle hindringer (distance).
Alle disse marginene må opprettholdes samtidig for at transporten skal komme vel fram. Men blir de det, samtidig som forutsetningene i første bud ivaretas, må det også nødvendigvis gå bra.
Altså det omvendte av en årsaksforklaring til det som går galt.
Så kan man kanskje si at fravær av ulykke i seg selv er en suksess. Men med tanke på det vi vil oppnå – å få noe transportert effektivt og uproblematisk fra ett sted til et annet – er det åpenbart at det er noe vi har tatt for gitt.
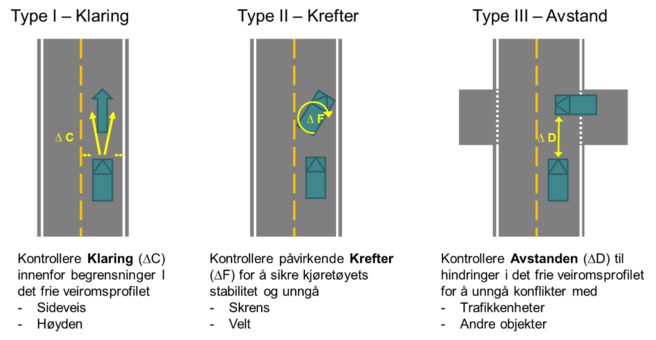
Figur 2: Tre typer marginer (ΔC, ΔF og ΔD) som må opprettholdes samtidig for at en transport kan forløpe sikkert.
Til nå har veitrafikksystemet satt sin lit til trafikantenes ferdigheter for å ivareta disse marginene. Men mulighetene som ligger i teknologien for å styrke påliteligheten i denne prosessen er nå større enn noen gang.
Bilprodusentene har allerede i dag førerstøttesystemer som hjelper til med å sikre opprettholdelse av marginene av Type I og Type III. Dette fordi slike systemer kan bygge på forhold produsentene selv rår over.
Det er derimot en mer kompleks oppgave å sikre ivaretakelse av en margin av Type II – kjøretøystabilitet. Dette fordrer en mer utstrakt utveksling av informasjon mellom kjøretøy og vei, og må baseres på et samarbeid mellom bilprodusenter og veimyndigheter.
Det vil også være nødvendig å utvikle avanserte læringsalgoritmer for å kunne tilby en funksjonalitet tilpasset det enkelte kjøretøy og under rådende forhold.
Derfor er det fortsatt få løsninger på markedet som kan hjelpe oss med en av de største utfordringene, som også vogntogene sliter med på norske veier – nemlig å avpasse farten etter forholdene for ikke å miste veigrepet.
Derfor har også Transportøkonomisk institutt i samarbeid med flere andre universitetsmiljøer og bilprodusenten Volvo søkt Forskningsrådet om midler til å utvikle en teknisk funksjonalitet som kan støtte ivaretakelse av Type II-marginen.
En slik funksjonalitet vil definitivt kunne bidra til å redusere ulykker av typen vi har sett på E8 i Troms og mange andre steder rundt om.
Den viktigste verdien med en omvendt ulykkesmodell er at den vil bevisstgjøre og hjelpe oss i å søke den kunnskapen vi trenger for å sikre at transporten skal gå bra. Uansett hvilken type transport det er snakk om.
For når vi har kontroll på forutsetningene og klarer å styre transporten med en margin til begrensningene, ja, da kan det ikke gå galt.
DEBATTREGLER I SAMFERDSEL
Har du synspunkter på denne saken, så kom gjerne med dem her i kommentarfeltet! Det du skriver vil i de fleste sammenhenger fremstå som mer interessant og troverdig dersom du skriver under fullt navn. Hold deg til saken, vis respekt og raushet overfor andre og deres meninger. Husk at det du skriver kan bli lest av mange!
Ytringer som inneholder trusler eller annen form for sjikane, vil bli fjernet.
Vennlig hilsen
Samferdsel-redaksjonen